
| Volume BaseComponent | |
| Attributes: Runtime | Development | System | Template | Detail C Binding: Struct | Class | Code ClassTree | INDEX NO INDEX |
|
Class CompPID
|
||
|---|---|---|
| Redaktör | hw/je | |
| Version | 1.0 | |
| Modified | 18-MAY-2006 14:49:40.40 | |
| Kod | rt_plc_bcomp.c | |
PID regulator.
Objektsbild regulator
Inmatningsfältet Set (gröna) används för att manuellt ändra börvärdet för regulatorn. Detta gäller under förutsättningen att INGET mod objekt är associerat (skrivs över). - Knapp Mode öppnar en bild för ett associerat modeobjekt CompModePID där man ändrar regulatorns mod mm.Objektsbild för regulatorns modobjekt

I normalfallet används Pidobjekt tillsammans med ett Modeobjekt. Gäller även
CompPID och CompMode.
Modeobjektet spelar då rollen av interface till Pidobjektet. Från Modeobjektet är
det möjligt att välja MANUAL, AUTO och CASCADE:
- Manual mod är en mod när regulatorns utsignal är tvångsstyrd till önskat
värde.
- Auto mod är en mod när regulatorns arbetar med internt börvärde från
modobjektet.
- Cascade mod (kaskad) är en mod där regulatorns arbetar med ett externt
börvärde, dvs modobjektets ingång XSetVal [XSV].
Algoritmens proportionella term respektive derivata term kan baseras antingen på
ärvärdet eller reglerfelet.
PidAlg anger fördelningen.
Exempel: PI+D innebär att P-delen och I-delen verkar på regleravvikelsen, medan
D-delen bara påverkas av ärvärdesförändringar. En stegändring av börvärdet ger
inte någon spik från D-delen, utan bara en stegändring från P-delen, och sedan
en integrering av reglerfelet.
I+P innebär på samma sätt att P-delen bara påverkas av ärvärdesförändringar. Vid
en stegändring av börvärdet får vi inget steg på utgången. Utstyrningen ändras
bara genom att det större reglerfelet börjar integrera utsignalen.
Vid P- och PD-algoritm används en absolut algoritm. Utsignalen kan då alltså inte
ligga stabilt skilt från noll utan regleravvikelse, annat än om man använder en
framkopplingssignal.
Vid alla algoritmer med I-del baseras hela tiden förändringar i utsignalen på
förändringar i insignalerna. Man kan fortfarande stänga av integrereringen med
en insignal till objektet.
Pid-objektet har två utgångar som båda kan användas som styrsignal. Vilken som
används i det enskilda fallet beror på hur regleringen är ordnad:
OUT (attributet OutVal ) innehåller ett värde som kan komma från regleralgoritmen,
från operatören i läge MANUAL eller vara ett s.k. tvångsstyrningsvärde.
Signalen används för t ex varvtalsutstyrning, eller som börvärdesposition till
ett ställdon.
OC (attributet OutChange ) anger hur ställdonet ska ändras mellan två successiva
exekveringar.
I detta fall talar man om algoritmens 'velocity' eller 'incremental form'.
Detta är användbart för ställdon som bara har öka- och minska-signaler, utan
lägesåterföring. Används då normalt med INC3P-objektet, som integrerar
förändringarna och omvandlar till tid för öka resp minska.
OutChange fortsätter att ge signal, även OutVal bottnat i MinOut eller MaxOut.
Derivata termen filtreras internt med 1:a ordningens filter. Filtreringen kopplas
bort genom att sätta DerGain = 0, men regleringen blir då ofta mycket störkänslig.
Normalt är DerGain ca 3, vilket innebär att utsignalen påverkas momentant 3 ggr
så mycket av derivatadelen som av P-delen. Derivatatillskottet smetas sedan ut
över tiden, så att det totala integrerade tillskottet blir lika stort som den
skulle bli utan filtrering.
En framkopplingssignal, Bias, kan inkluderas i algoritmen genom en ingångssignal
till objektet.
Utvärdet, OutVal, begränsas till intervallet { MinOut, MaxOut }. Det innebär att
man kan tappa det stabila läget vid en orolig reglering, speciellt vid inkopplad
D-del.
Exempel: Vi har en ganska orolig flödesreglering (utsignal 0-100 %) och reglerar
nära maxvarvet för pumpen. Vi behöver styra ut i snitt 98 % för att nå önskat
börvärde. Utsignalen fladdrar ca +- 5 % pga störningar. Om MaxOut är 100 %, så
innebär det att regulatorn bottnar regelbundet. Utsignalen kommer då att svänga
mellan 90 och 100 % med en medelutsignal på ca 95%, och vi når inte önskat
börvärde.
Lösning: Sätt MinOut och MaxOut till -10 % resp 110 %. Utsignalen kommer att
svänga mellan 93 och 103% med ett medel på 98%, och vi uppnår önskat börvärde.
Utsignalen får sedan begränsas till 0 - 100 % utanför PID-regulatorn.
Regulatorn har stötfri omkoppling AUTO / MANUAL och efter annan tvångsstyrning av
regulatorn.
Dock ej vid P- eller PD-reglering.
EXEMPEL 1
Exempelkurvor för att visa P- och Delens inverkan vid olika typinställningar.
Insignal steg och ramp.
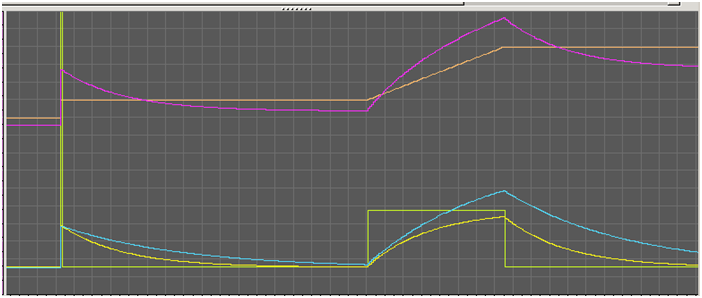
Övre delen:
Brun kurva. Ärvärde (samma som P-del från regulatorn). Steg samt ramp.
Lila kurva. Utsignal från PD med Kp = 1, DerTime = 10s, DerGain = 3.
Nedre delen - D-del från regulatorn.
Grön kurva. DerTime = 10s. Ingen filtrering (DerGain = 0). Notera spiken vid
stegändringen.
Gul kurva. DerTime = 10s. Filtrerad D-del DerGain = 3.
Blå kurva. DerTime = 20s. Filtrerad D-del DerGain = 3.
EXEMPEL 2 för att visa skillnaden mellan PID, PI+D och I+PD vid återkopplat
system och stegförändring av börvärdet:
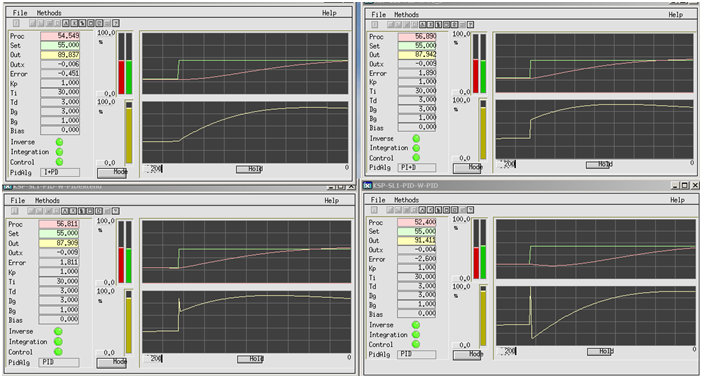
I+PD (uppe till vänster) börjar sakta integrera upp styrsignalen vid stegändring.
PI+D (uppe till höger) ger ett stegsvar som medför att vi får en snabbare
reglering till nya börvärdet.
PID (nere till vänster) ger en kort spik vid stegändringen. Denna regulator har
MaxOut = 500%
PID (nere till höger) är identisk med föregående, men har MaxOut = 100%, vilket
ger "bakvänt" resultat. P ger ca 30 % upp, D ger en spik på ca 90 % Totalt ca
155 % Regulatorn bottnar i 100 % utsignal, och när vi sedan tar bort D-spiken
på 90 % får regulatorn börja om från 10 % utsignal.
Flödesreglering med varvtalsreglerad pump; se figur nedan (Speed Control of a Pump). - Börvärde sätts från externt optimeringsprogram (Av-signalen OptFlow) t.ex 1 gång / 10 min eller direkt av operatör. - Börja med styrsignalen 0 vid pumpstart.
Speed Control of a Pump En principlösning för styrning av den varvtalsreglerade pumpen visas i figuren nedan (Configuration of Speed Control of a Pump)
Configuration of Speed Control of a Pump Mode-objektets attribut modifieras enligt följande:

Pid-objektets attribut modifieras enligt följande:
Insignalen på fo1-ingången tillsammans med OpMod-attributet i Mode-objektet bestämer aktuellt driftfall.OpMod = MANUAL (=1)
Då Mode-objektets for-utgång blir TRUE tvingas Pid-objekt utgång anta värdet på FOV-ingången. Vid ändring av driftläge, AUTO --> MANUAL, innehåller ForcVal styr- signalens ( OutVal ) senaste värde. Detta är ett bra värde att starta manuella ändringar utifrån. I detta driftläge kan operatören ändra ForcVal liksom börvärdet SetVal. MinOut och MaxOut, i Pid-objektet, utgör ingen begränsning i läge MANUAL.OpMod = AUTO (=2)
Operatören sätter flödesbörvärdet SetVal. Värdet ska ligga i intervallet MinSet till MaxSet. Optimeringsbörvärdet XSetVal ignoreras. Regulatorns styrsignal, OutVal varierar i intervallet MinOut till MaxOut. Mode-objektet avläser Pid-objektets OutVal och lagrar värdet i utgången ForcVal så länge AUTO gäller.OpMod = CASCADE (=4)
Det externa optimeringsbörvärdet i XSetVal kopieras över till SetVal. Pid-objektet reglerar mot detta börvärde.Force1 = 1 PUMP STOP
Oberoende av värdet på OpMod tvångsstyrs regulatorns styrsignal till ForcVal = XForcVal (=0), dvs MinOut och MaxOut utgör ingen begrgänsning vid tvångsstyrning.
Shunt Control
Genom shuntreglering över värmeväxlaren, skall TT1-temperaturen hållas
konstant i sekundärnätet. TT2-temperaturen på returflödet till pannan ('BOILER')
får dock inte understiga daggpunkttemperaturen vilket skulle kunna ske vid stora
effektuttag.
Vid låg primärtemperatur väljs TT2-reglering. Då driftsförhållanden medger sker
återgång till TT1-reglering.
I läge MANUAL sker styrningen med TT1-regulatorn. TIC2 får ej läggas i MANUAL.
Se figur nedan (PLC program with Alternative Controllers).
Inställningar
... i Mode-objektet TIC1M har valts:
- AccMod = 3 , dvs AUTO / MANUAL är båda tillåtna.
- OpMod = AUTO, betyder att operatören sätter SetVal
= MANUAL, betyder att operatören sätter utsignalen ForcVal
... i Pid-objektet TIC1 har valts:
- Inverse = TRUE, dvs. låg TT1-temperatur medför ökat flöde genom värmeväxlaren.
... i Mode-objektet TIC2M har valts:
- AccMod = 2 , dvs. endast AUTO
- Konstruktören sätter gränsvärdet, dvs minvärdet av TT2, i SetVal
... i Pid-objektet TIC2 har valts:
- Inverse = FALSE, dvs. omvänt styringrepp, vid låga TT2-temperaturer minskar
flödet genom värmeväxlaren, by-pass flödet ökar.
PLC program with Alternative Controllers Driftfall: - Normal drift. TIC1 i AUTO. TIC2 följer i tvångsstyrning. - TT2 låg. TIC1 väljer i tvångsstyrning. - TIC1M i MANUELL. TIC1 ställer ut operatörens värde från TICM. ForcVal . - TIC2 följer i tvångsstyrning. - TIC2 återgår till AUTO då TT2 går under gränsen - Flödet genom värmeväxlaren är tillräckligt för att TT1-temperaturen ska gå över börvärdet. Växla till TT1-reglering, dvs TIC1 styr shuntventilen.
Temperaturreglering i ugn med två separata bränsleflödesloopar, med undantag för förbränningsluftregleringen, visas i figuren nedan. TT avser en temperatur transmitter, FT flödes transmittrar och FIC flödesregulatorer. TIC är en temperatur regulator
Block Diagram for Temperature Control Alla Pid-objekt har Inverse satt till TRUE. Lösningen bör kompletteras med tvångsstyrning av TIC1M till medelflöde då ingen FICx ligger i kaskad. En realiseringen visas i figuren nedan (Traditional Cascade Configuration).
Traditional Cascade Configuration
I figuren nedan (Two Levels with Mode Objects in a Control Loop) delar två reglerloopar en gemensamma mod-instans för synkront uppträdande i AUTO och MANUAL. Men varje enskild loop kan också styras individuellt från separata Mode-objekt med internt börvärde och egen manuell utsignal. Den individuella styrningen överrider den gemensamma.
Two Levels with Mode Objects in a Control Loop
Figuren nedan (Addition of a Reagent) visar tillsats av en reagens. Blandningsförhållandet ska hållas konstant oberoende av FT2-flödet. FT är flödestransmittern och FIC flödesregulatorn.
Addition of a Reagent En realisering visas i figuren nedan (Ratio Control). Regleringen kan ske i AUTO (= operatören ger kvotbörvärde) eller MANUAL ( = operatören ger själv utsignalens storlek). Kvotärvärdet bör kontrollers för att förhindra division med noll.
Ratio ControlPlc kod
För PLC programmering används funktionsobjektet CompPid_Fo.

Skapa ett funktionsobjekt i PLC editorn och koppla till objektet i planthierarkin.Se även
| RtBody attributes pwr_sClass_CompPID | |||
|---|---|---|---|
| String80 | Description | Optional description. |
|
| Float32 | ProcVal | Ärvärdessignal som kopplas in till PLC funktionsobjektet (PROCess VALue). | |
| Float32 | SetVal | Börvärdessignal som kopplas in till PLC funktionsobjektet (SETpoint VALue). Denna ingång hämtar oftast signalen från en utgång på det associerade Mode-objektet. |
|
| Float32 | Bias | Framkopplingsvärde ( 'feed forward value') som kopplas in till PLC funktionsobjektet. Attributet kan ändras från Pid - objektets MERbild. |
|
| Float32 | ForcVal | Tvångsstyrningsvärdet som kopplas in till PLC funktionsobjektet. Då Force är TRUE sätts OutVal = ForcVal . Denna ingång hämtar oftast signalen från en utgång på det associerade Mode-objektet. |
|
| Boolean | Force | Tvingaorder som kopplas in till PLC funktionsobjektet. Anger om något av alternativen tvångsstyrning / MANUAL gäller eller inte. FALSE betyder att inget av dessa alternativ är förhanden; TRUE innebär att antingen tvångsstyrning eller MANUAL valts. Denna ingång hämtar oftast signalen från en utgång på det associerade Mode-objektet. |
|
| Boolean | IntOff | Avstängning integreringsorder som kopplas in till PLC funktionsobjektet. Anger om integrationen kopplats bort eller inte. FALSE betyder att integrationstermen ska vara med; TRUE innebär att integrationen kopplats bort. Attributet kan ändras från Pid-objektets MERbild. |
|
| Float32 | OutVal | Utgången ifrån PLC funktionsobjektet. Regulatorns styrsignal. Värdet baseras på algoritmens 'positional form', från operatören i läge MANUAL eller på ett s.k. tvångsstyrningsvärde. |
|
| Float32 | OutChange | Utgång ifrån PLC funktionsobjektet. Regulatorns styrsignal baserad på 'incremental form'. Attributet avser styrsignalsförändringen mellan två konsekutiva exekveringar; dvs. OutVal t - OutVal t-1 . |
|
| Float32 | ControlDiff | Differensutsignal är/börvärde ifrån PLC funktionsobjektet. Reglerfelet (= ProcVal - SetVal ). |
|
| Boolean | EndMax | Utgång maxvärde aktiverat ifrån PLC funktionsobjektet. Se EndMin |
|
| Boolean | EndMin | Utgång minvärde aktiverat ifrån PLC funktionsobjektet. Om beräknat värde på OutVal inte tillhör intervallet { MinOut , MaxOut } ska begränsning ske till motsvarande intervallgräns. Attributet anger om sådan begränsning skett vid den senaste exekveringen eller inte. Om begränsning görs mot -- MinOut , ska EndMin sättas TRUE -- MaxOut , ska EndMax sättas TRUE annars är de FALSE. EndMin / EndMax kan endast sättas i driftläge AUTO och CASCADE. Se också EndHys nedan. |
|
| PidAlgEnum | PidAlg | Det finns åtskilliga diskreta variationer av PID algoritmen. PidAlg anger det aktuella valet. Följande realiseringar finns att välja mellan: 1 -- I I-regulator. Regulator med endast I-verkan. Gain används inte. 3 -- I + P Integrerande regulator med proportionell regler- verkan. P-termen baseras på ärvärdet ProcVal. 6 -- P P-regulator. Ger endast proportionell reglerverkan. 7 -- PI PI-regulator. Regulator som ger proportionell och integrerande reglerverkan. P-termen baseras på reglerfelet ControlDiff. 11 -- I + PD Integrerande regulator med proportionell deriverande reglerverkan. Både P- och D-termen baseras på ärvärdet ProcVal. 14 -- P + D Proportionell regulator med deriverande reglerverkan. P baseras på reglerfelet, D på ärvärdet. 15 -- PI + D Proportionell integrerande regulator med deriverande reglerverkan. P-termen baseras på reglerfelet ControlDiff, D på ärvärdet value. 30 -- PD PD-regulator. Regulator som ger proportionell och deriverande reglerverkan. Både P- och D-termen baseras på reglerfelet. 31 -- PID PID-regulator. Regulator som ger proportionell integrerande och deriverande reglerverkan. Både P- och D-termen baseras på reglerfelet. |
|
| Float32 | Gain | Proportionalitetsfaktorn. Anger förstärkningen; = 0. Värdet kan ändras från Pid-objektets MERbild. |
|
| Float32 | IntTime | Anger, i sekunder, integrationstiden. Värdet kan ändras från Pid-objektets MERbild. |
|
| Float32 | DerTime | Anger deriveringstiden i sekunder. Normalt gäller att DerTime är större än ScanTime och 1.0 = DerGain < |
|
| Float32 | DerGain | Derivatatermens bidrag till styrsignalen kan filteraras i ett 1:a ordningens filter. Attributet definierar filtret. Om, 1.0 = DerGain < , annars ingen filtrering DerGain är normalt i storleksordningen 3 till 4. Värdet kan ändras från Pid-objektets MERbild. |
|
| Boolean | Inverse | Anger om reglerverkan ska ske inverterat eller inte. FALSE betyder att ett vid oförändrat börvärde spontant växande ärvärde möts av en ökande styrsignal, dvs. omvänd reglerverkan. TRUE är normalfallet, då ett spontant ökande ärvärde möts med en minskande styrsignal. |
|
| Float32 | BiasGain | Anger framkopplingens förstärkning; faktorn får vara negativ. Värdet kan ändras från Pid-objektets MERbild. |
|
| Boolean | PDAbsFlag | Flag to force no offset after amnual mode. Will cause an output jump when switching from manual to Auto. Not Bumpless transfer |
|
| WindupMaskEnum | WindupMask | WindupMask The possible values are as follows: 1 -- I Only the I-part is limited in OutWindup 2 -- BI Bias and I are limited in OutWindup 4 -- BPI Bias, P and I are limited in OutWindup 8 -- BPID All parts of the controller are limited in OutWindup |
|
| Float32 | MinWindup | At AUTO and CASCADE control, for controllers with an I-part, the control signal OutWindup is supposed to be in the interval { MinWindup, MaxWindup }. The EndMin / EndMax flags are used to signal if any limitation has ocurred. If OutWindup is greater than MaxWindup, or less than MinWindup, OutWindup is limited to the value at the end of the interval. If MinWindup >= MaxWindup no limitation will occur. After addition of the absolute part, OutVal is limited to the interval { MinOut, MaxOut }. If MinOut >= MaxOut no limitation will occur. |
|
| Float32 | MaxWindup | ||
| Float32 | MinOut | I driftläge AUTO och CASCADE ska den utställda styrsignlaen OutVal vara i intervallet { MinOut , MaxOut }. Flaggorna EndMin / EndMax används för att signalera då begränsning sker. Om OutVal är större än MaxOut eller mindre än MinOut , begränsas OutVal till värdet av motsvarande intervallgräns. Om MinOut = MaxOut sker ingen begränsning. |
|
| Float32 | MaxOut | Se MinOut | |
| Float32 | EndHys | Anger hysteresen på MinOut och MaxOut i samband med manövreringen av EndMin / EndMax flaggorna. |
|
| Float32 | SetMinShow | Skalområdets nedre gräns vid presentation av ProcVal och SetVal i Pid-objektets objektbild. Värdena kan ändras från Pid-objektets MERbild. |
|
| Float32 | SetMaxShow | Skalområdets övre gräns vid presentation av ProcVal och SetVal i Pid-objektets objektbild. Värdena kan ändras från Pid-objektets MERbild. |
|
| String16 | SetEngUnit | Anger ingenjörsenheten på SetMinShow / SetMaxShow , t.ex. meter. Används i Pid-objektets objektbild. |
|
| FloatPrecisionEnum | SetPrecision | Specifies the number of characters displayed after the decimal point for set value and process value in the object graph. |
|
| Float32 | OutMinShow | Skalområdets nedre gräns vid presentation av OutVal i Pid-objektets objektbild. Värdena kan ändras från Pid-objektets MERbild. |
|
| Float32 | OutMaxShow | Skalområdets övre gräns vid presentation av OutVal i Pid-objektets objektbild. Värdena kan ändras från Pid-objektets MERbild. |
|
| String16 | OutEngUnit | Anger ingenjörsenheten på OutMinShow / OutMaxShow , t.ex. %. Används i Pid-objektets objektbild. |
|
| FloatPrecisionEnum | OutPrecision | Specifies the number of characters displayed after the decimal point for output value in the object graph. |
|
| Float32 | TrendTimeRange | Specifies time range for the trends in the object graph. | |
| Int32 | AccGain | Ej implementerad funktion. Anger operatörens behörighet att ändra värde på Gain resp. IntTime . Följande behörigheter är möjliga: 0 -- Ingen ändring tillåten ? 0 -- ändring tillåten. |
|
| Int32 | AccInt | Ej implementerad funktion. Anger operatörens behörighet att ändra värde på Gain resp. IntTime . Följande behörigheter är möjliga: 0 -- Ingen ändring tillåten ? 0 -- ändring tillåten. |
|
| Int32 | AccDer | Ej implementerad funktion. Anger operatörens behörighet att ändra värde på DerTime. Följande behörigheter är möjliga: 0 -- Ingen ändring tillåten ? 0 -- ändring tillåten. |
|
| Int32 | AccDGain | Ej implementerad funktion. Anger operatörens behörighet att ändra värde på DerGain . Följande behörigheter är möjliga: 0 -- Ingen ändring tillåten ? 0 -- ändring tillåten. |
|
| Int32 | AccBias | Ej implementerad funktion. Anger operatörens behörighet att ändra värde på Bias. Följande behörigheter är möjliga: 0 -- Ingen ändring tillåten ? 0 -- ändring tillåten. |
|
| Int32 | AccBGain | Ej implementerad funktion. Anger operatörens behörighet att ändra värde på BiasGain . Följande behörigheter är möjliga: 0 -- Ingen ändring tillåten ? 0 -- ändring tillåten. |
|
| Float32 | MinGain | Minsta tillåtna värde vid operatörsändring av Gain. | |
| Float32 | MaxGain | Största tillåtna värde vid operatörsändring av Gain. | |
| Float32 | MinInt | Minsta tillåtna värde vid operatörsändring av IntTim. | |
| Float32 | MaxInt | Största tillåtna värde vid operatörsändring av IntTim. | |
| Float32 | MinDer | Minsta tillåtna värde vid operatörsändring av DerTim . | |
| Float32 | MaxDer | Största tillåtna värde vid operatörsändring av DerTim . | |
| Float32 | MinDGain | The minimum and maximum allowed value of DerGain at changes made by an operator. |
|
| Float32 | MaxDGain | ||
| Float32 | MinBias | Minsta tillåtna värde vid operatörsändring av Gain . | |
| Float32 | MaxBias | Största tillåtna värde vid operatörsändring av Gain . | |
| Float32 | MinBGain | Minsta tillåtna värde vid operatörsändring av BiasGain . | |
| Float32 | MaxBGain | Största tillåtna värde vid operatörsändring av BiasGain . | |
| AttrRef | ModeObjDid | Anger fullständigt namn på det med Pid-objektet associerade Mode-objektet. Attributet gör det möjligt att via knapp i Pid-objektets objektbild starta objektbilden för det associerade Mode-objektet. |
|
| Float32 | FiltDer | Filtrerad derivata sparas till nästa exekevering. | |
| Float32 | PDManOffset | Offset for P / PD-Controller after switching from manual to auto mode. |
|
| Float64 | OutWindup | Output that is limited with MinWindup and MaxWindup |
|
| Float64 | AbsOut | The absolute part of the output. (contrary to OutWindup) | |
| AttrRef | PlcConnect | Referens som visar vilket funktionsobjekt objektet har blivit knuten (connected) till. | |
| Template Object | |
|---|---|
| PidAlg | 3 |
| Gain | 1.000000e+00 |
| IntTime | 1.200000e+02 |
| DerGain | 3.000000e+00 |
| Inverse | 1 |
| BiasGain | 1.000000e+00 |
| WindupMask | 4 |
| MaxWindup | 1.000000e+02 |
| MaxOut | 1.000000e+02 |
| SetMaxShow | 1.000000e+02 |
| SetEngUnit | % |
| SetPrecision | 1 |
| OutMaxShow | 1.000000e+02 |
| OutEngUnit | % |
| OutPrecision | 1 |
| TrendTimeRange | 1.000000e+02 |
| AccGain | 15 |
| AccInt | 15 |
| AccDer | 15 |
| AccBias | 15 |
| AccBGain | 15 |
| MinGain | 1.000000e-01 |
| MaxGain | 1.000000e+01 |
| MinInt | 1.000000e+01 |
| MaxInt | 6.000000e+02 |
| MaxDer | 2.000000e+01 |
| MaxBias | 1.000000e+02 |
| MinBGain | -1.000000e+02 |
| MaxBGain | 1.000000e+02 |
| Description Attribute | ||
|---|---|---|
| Klass | Attribute | |
| Typ | String80 | |
| Flags | ||
| Kropp | RtBody | |
Optional description.
| ProcVal Attribute | ||
|---|---|---|
| Klass | Attribute | |
| Typ | Float32 | |
| Flags | ReduTransfer|State|Noedit | |
| Kropp | RtBody | |
Ärvärdessignal som kopplas in till PLC funktionsobjektet (PROCess VALue).
| SetVal Attribute | ||
|---|---|---|
| Klass | Attribute | |
| Typ | Float32 | |
| Flags | ReduTransfer | |
| Kropp | RtBody | |
Börvärdessignal som kopplas in till PLC funktionsobjektet (SETpoint VALue). Denna ingång hämtar oftast signalen från en utgång på det associerade Mode-objektet.
| Bias Attribute | ||
|---|---|---|
| Klass | Attribute | |
| Typ | Float32 | |
| Flags | ReduTransfer|State|Noedit | |
| Kropp | RtBody | |
Framkopplingsvärde ( 'feed forward value') som kopplas in till PLC funktionsobjektet. Attributet kan ändras från Pid - objektets MERbild.
| ForcVal Attribute | ||
|---|---|---|
| Klass | Attribute | |
| Typ | Float32 | |
| Flags | ReduTransfer | |
| Kropp | RtBody | |
Tvångsstyrningsvärdet som kopplas in till PLC funktionsobjektet. Då Force är TRUE sätts OutVal = ForcVal . Denna ingång hämtar oftast signalen från en utgång på det associerade Mode-objektet.
| Force Attribute | ||
|---|---|---|
| Klass | Attribute | |
| Typ | Boolean | |
| Flags | ReduTransfer | |
| Kropp | RtBody | |
Tvingaorder som kopplas in till PLC funktionsobjektet. Anger om något av alternativen tvångsstyrning / MANUAL gäller eller inte. FALSE betyder att inget av dessa alternativ är förhanden; TRUE innebär att antingen tvångsstyrning eller MANUAL valts. Denna ingång hämtar oftast signalen från en utgång på det associerade Mode-objektet.
| IntOff Attribute | ||
|---|---|---|
| Klass | Attribute | |
| Typ | Boolean | |
| Flags | ReduTransfer|State|Noedit | |
| Kropp | RtBody | |
Avstängning integreringsorder som kopplas in till PLC funktionsobjektet. Anger om integrationen kopplats bort eller inte. FALSE betyder att integrationstermen ska vara med; TRUE innebär att integrationen kopplats bort. Attributet kan ändras från Pid-objektets MERbild.
| OutVal Attribute | ||
|---|---|---|
| Klass | Attribute | |
| Typ | Float32 | |
| Flags | ReduTransfer|State|Noedit | |
| Kropp | RtBody | |
Utgången ifrån PLC funktionsobjektet. Regulatorns styrsignal. Värdet baseras på algoritmens 'positional form', från operatören i läge MANUAL eller på ett s.k. tvångsstyrningsvärde.
| OutChange Attribute | ||
|---|---|---|
| Klass | Attribute | |
| Typ | Float32 | |
| Flags | ReduTransfer|State|Noedit | |
| Kropp | RtBody | |
Utgång ifrån PLC funktionsobjektet. Regulatorns styrsignal baserad på 'incremental form'. Attributet avser styrsignalsförändringen mellan två konsekutiva exekveringar; dvs. OutVal t - OutVal t-1 .
| ControlDiff Attribute | ||
|---|---|---|
| Klass | Attribute | |
| Typ | Float32 | |
| Flags | ReduTransfer|State|Noedit | |
| Kropp | RtBody | |
Differensutsignal är/börvärde ifrån PLC funktionsobjektet. Reglerfelet (= ProcVal - SetVal ).
| EndMax Attribute | ||
|---|---|---|
| Klass | Attribute | |
| Typ | Boolean | |
| Flags | ReduTransfer|State|Noedit | |
| Kropp | RtBody | |
Utgång maxvärde aktiverat ifrån PLC funktionsobjektet. Se EndMin
| EndMin Attribute | ||
|---|---|---|
| Klass | Attribute | |
| Typ | Boolean | |
| Flags | ReduTransfer|State|Noedit | |
| Kropp | RtBody | |
Utgång minvärde aktiverat ifrån PLC funktionsobjektet.
Om beräknat värde på OutVal inte tillhör intervallet { MinOut , MaxOut } ska
begränsning ske till motsvarande intervallgräns. Attributet anger om sådan
begränsning skett vid den senaste exekveringen eller inte.
Om begränsning görs mot
-- MinOut , ska EndMin sättas TRUE
-- MaxOut , ska EndMax sättas TRUE
annars är de FALSE.
EndMin / EndMax kan endast sättas i driftläge AUTO och CASCADE. Se
också EndHys nedan.
| PidAlg Attribute | ||
|---|---|---|
| Klass | Attribute | |
| Typ | PidAlgEnum | |
| Flags | ||
| Kropp | RtBody | |
Det finns åtskilliga diskreta variationer av PID algoritmen. PidAlg anger det aktuella valet. Följande realiseringar finns att välja mellan: 1 -- I I-regulator. Regulator med endast I-verkan. Gain används inte. 3 -- I + P Integrerande regulator med proportionell regler- verkan. P-termen baseras på ärvärdet ProcVal. 6 -- P P-regulator. Ger endast proportionell reglerverkan. 7 -- PI PI-regulator. Regulator som ger proportionell och integrerande reglerverkan. P-termen baseras på reglerfelet ControlDiff. 11 -- I + PD Integrerande regulator med proportionell deriverande reglerverkan. Både P- och D-termen baseras på ärvärdet ProcVal. 14 -- P + D Proportionell regulator med deriverande reglerverkan. P baseras på reglerfelet, D på ärvärdet. 15 -- PI + D Proportionell integrerande regulator med deriverande reglerverkan. P-termen baseras på reglerfelet ControlDiff, D på ärvärdet value. 30 -- PD PD-regulator. Regulator som ger proportionell och deriverande reglerverkan. Både P- och D-termen baseras på reglerfelet. 31 -- PID PID-regulator. Regulator som ger proportionell integrerande och deriverande reglerverkan. Både P- och D-termen baseras på reglerfelet.
| Gain Attribute | ||
|---|---|---|
| Klass | Attribute | |
| Typ | Float32 | |
| Flags | ReduTransfer | |
| Kropp | RtBody | |
Proportionalitetsfaktorn. Anger förstärkningen; = 0. Värdet kan ändras från Pid-objektets MERbild.
| IntTime Attribute | ||
|---|---|---|
| Klass | Attribute | |
| Typ | Float32 | |
| Flags | ReduTransfer | |
| Kropp | RtBody | |
Anger, i sekunder, integrationstiden. Värdet kan ändras från Pid-objektets MERbild.
| DerTime Attribute | ||
|---|---|---|
| Klass | Attribute | |
| Typ | Float32 | |
| Flags | ReduTransfer | |
| Kropp | RtBody | |
Anger deriveringstiden i sekunder. Normalt gäller att DerTime är större än ScanTime och 1.0 = DerGain <
| DerGain Attribute | ||
|---|---|---|
| Klass | Attribute | |
| Typ | Float32 | |
| Flags | ReduTransfer | |
| Kropp | RtBody | |
Derivatatermens bidrag till styrsignalen kan filteraras i ett 1:a ordningens filter. Attributet definierar filtret. Om, 1.0 = DerGain < , annars ingen filtrering DerGain är normalt i storleksordningen 3 till 4. Värdet kan ändras från Pid-objektets MERbild.
| Inverse Attribute | ||
|---|---|---|
| Klass | Attribute | |
| Typ | Boolean | |
| Flags | ReduTransfer | |
| Kropp | RtBody | |
Anger om reglerverkan ska ske inverterat eller inte. FALSE betyder att ett vid oförändrat börvärde spontant växande ärvärde möts av en ökande styrsignal, dvs. omvänd reglerverkan. TRUE är normalfallet, då ett spontant ökande ärvärde möts med en minskande styrsignal.
| BiasGain Attribute | ||
|---|---|---|
| Klass | Attribute | |
| Typ | Float32 | |
| Flags | ReduTransfer | |
| Kropp | RtBody | |
Anger framkopplingens förstärkning; faktorn får vara negativ. Värdet kan ändras från Pid-objektets MERbild.
| PDAbsFlag Attribute | ||
|---|---|---|
| Klass | Attribute | |
| Typ | Boolean | |
| Flags | ReduTransfer | |
| Kropp | RtBody | |
Flag to force no offset after amnual mode. Will cause an output jump when switching from manual to Auto. Not Bumpless transfer
| WindupMask Attribute | ||
|---|---|---|
| Klass | Attribute | |
| Typ | WindupMaskEnum | |
| Flags | ||
| Kropp | RtBody | |
WindupMask The possible values are as follows: 1 -- I Only the I-part is limited in OutWindup 2 -- BI Bias and I are limited in OutWindup 4 -- BPI Bias, P and I are limited in OutWindup 8 -- BPID All parts of the controller are limited in OutWindup
| MinWindup Attribute | ||
|---|---|---|
| Klass | Attribute | |
| Typ | Float32 | |
| Flags | ReduTransfer | |
| Kropp | RtBody | |
At AUTO and CASCADE control, for controllers with an I-part,
the control signal OutWindup is supposed to be
in the interval { MinWindup, MaxWindup }.
The EndMin / EndMax flags are used to signal if any
limitation has ocurred.
If OutWindup is greater than MaxWindup, or less than MinWindup,
OutWindup is limited to the value at the end of the interval.
If MinWindup >= MaxWindup no limitation will occur.
After addition of the absolute part,
OutVal is limited to the interval { MinOut, MaxOut }.
If MinOut >= MaxOut no limitation will occur.
| MaxWindup Attribute | ||
|---|---|---|
| Klass | Attribute | |
| Typ | Float32 | |
| Flags | ReduTransfer | |
| Kropp | RtBody | |
| MinOut Attribute | ||
|---|---|---|
| Klass | Attribute | |
| Typ | Float32 | |
| Flags | ||
| Kropp | RtBody | |
I driftläge AUTO och CASCADE ska den utställda styrsignlaen OutVal vara i
intervallet { MinOut , MaxOut }. Flaggorna EndMin / EndMax används för att
signalera då begränsning sker.
Om OutVal är större än MaxOut eller mindre än MinOut , begränsas OutVal
till värdet av motsvarande intervallgräns.
Om MinOut = MaxOut sker ingen begränsning.
| MaxOut Attribute | ||
|---|---|---|
| Klass | Attribute | |
| Typ | Float32 | |
| Flags | ||
| Kropp | RtBody | |
Se MinOut
| EndHys Attribute | ||
|---|---|---|
| Klass | Attribute | |
| Typ | Float32 | |
| Flags | ReduTransfer | |
| Kropp | RtBody | |
Anger hysteresen på MinOut och MaxOut i samband med manövreringen av EndMin / EndMax flaggorna.
| SetMinShow Attribute | ||
|---|---|---|
| Klass | Attribute | |
| Typ | Float32 | |
| Flags | ReduTransfer | |
| Kropp | RtBody | |
Skalområdets nedre gräns vid presentation av ProcVal och SetVal i Pid-objektets objektbild. Värdena kan ändras från Pid-objektets MERbild.
| SetMaxShow Attribute | ||
|---|---|---|
| Klass | Attribute | |
| Typ | Float32 | |
| Flags | ReduTransfer | |
| Kropp | RtBody | |
Skalområdets övre gräns vid presentation av ProcVal och SetVal i Pid-objektets objektbild. Värdena kan ändras från Pid-objektets MERbild.
| SetEngUnit Attribute | ||
|---|---|---|
| Klass | Attribute | |
| Typ | String16 | |
| Flags | ||
| Kropp | RtBody | |
Anger ingenjörsenheten på SetMinShow / SetMaxShow , t.ex. meter. Används i Pid-objektets objektbild.
| SetPrecision Attribute | ||
|---|---|---|
| Klass | Attribute | |
| Typ | FloatPrecisionEnum | |
| Flags | ||
| Kropp | RtBody | |
Specifies the number of characters displayed after the decimal point for set value and process value in the object graph.
| OutMinShow Attribute | ||
|---|---|---|
| Klass | Attribute | |
| Typ | Float32 | |
| Flags | ReduTransfer | |
| Kropp | RtBody | |
Skalområdets nedre gräns vid presentation av OutVal i Pid-objektets objektbild. Värdena kan ändras från Pid-objektets MERbild.
| OutMaxShow Attribute | ||
|---|---|---|
| Klass | Attribute | |
| Typ | Float32 | |
| Flags | ReduTransfer | |
| Kropp | RtBody | |
Skalområdets övre gräns vid presentation av OutVal i Pid-objektets objektbild. Värdena kan ändras från Pid-objektets MERbild.
| OutEngUnit Attribute | ||
|---|---|---|
| Klass | Attribute | |
| Typ | String16 | |
| Flags | ||
| Kropp | RtBody | |
Anger ingenjörsenheten på OutMinShow / OutMaxShow , t.ex. %. Används i Pid-objektets objektbild.
| OutPrecision Attribute | ||
|---|---|---|
| Klass | Attribute | |
| Typ | FloatPrecisionEnum | |
| Flags | ||
| Kropp | RtBody | |
Specifies the number of characters displayed after the decimal point for output value in the object graph.
| TrendTimeRange Attribute | ||
|---|---|---|
| Klass | Attribute | |
| Typ | Float32 | |
| Flags | ||
| Kropp | RtBody | |
Specifies time range for the trends in the object graph.
| AccGain Attribute | ||
|---|---|---|
| Klass | Attribute | |
| Typ | Int32 | |
| Flags | ||
| Kropp | RtBody | |
Ej implementerad funktion. Anger operatörens behörighet att ändra värde på Gain resp. IntTime . Följande behörigheter är möjliga: 0 -- Ingen ändring tillåten ? 0 -- ändring tillåten.
| AccInt Attribute | ||
|---|---|---|
| Klass | Attribute | |
| Typ | Int32 | |
| Flags | ||
| Kropp | RtBody | |
Ej implementerad funktion. Anger operatörens behörighet att ändra värde på Gain resp. IntTime . Följande behörigheter är möjliga: 0 -- Ingen ändring tillåten ? 0 -- ändring tillåten.
| AccDer Attribute | ||
|---|---|---|
| Klass | Attribute | |
| Typ | Int32 | |
| Flags | ||
| Kropp | RtBody | |
Ej implementerad funktion. Anger operatörens behörighet att ändra värde på DerTime. Följande behörigheter är möjliga: 0 -- Ingen ändring tillåten ? 0 -- ändring tillåten.
| AccDGain Attribute | ||
|---|---|---|
| Klass | Attribute | |
| Typ | Int32 | |
| Flags | ||
| Kropp | RtBody | |
Ej implementerad funktion. Anger operatörens behörighet att ändra värde på DerGain . Följande behörigheter är möjliga: 0 -- Ingen ändring tillåten ? 0 -- ändring tillåten.
| AccBias Attribute | ||
|---|---|---|
| Klass | Attribute | |
| Typ | Int32 | |
| Flags | ||
| Kropp | RtBody | |
Ej implementerad funktion. Anger operatörens behörighet att ändra värde på Bias. Följande behörigheter är möjliga: 0 -- Ingen ändring tillåten ? 0 -- ändring tillåten.
| AccBGain Attribute | ||
|---|---|---|
| Klass | Attribute | |
| Typ | Int32 | |
| Flags | ||
| Kropp | RtBody | |
Ej implementerad funktion. Anger operatörens behörighet att ändra värde på BiasGain . Följande behörigheter är möjliga: 0 -- Ingen ändring tillåten ? 0 -- ändring tillåten.
| MinGain Attribute | ||
|---|---|---|
| Klass | Attribute | |
| Typ | Float32 | |
| Flags | ||
| Kropp | RtBody | |
Minsta tillåtna värde vid operatörsändring av Gain.
| MaxGain Attribute | ||
|---|---|---|
| Klass | Attribute | |
| Typ | Float32 | |
| Flags | ||
| Kropp | RtBody | |
Största tillåtna värde vid operatörsändring av Gain.
| MinInt Attribute | ||
|---|---|---|
| Klass | Attribute | |
| Typ | Float32 | |
| Flags | ||
| Kropp | RtBody | |
Minsta tillåtna värde vid operatörsändring av IntTim.
| MaxInt Attribute | ||
|---|---|---|
| Klass | Attribute | |
| Typ | Float32 | |
| Flags | ||
| Kropp | RtBody | |
Största tillåtna värde vid operatörsändring av IntTim.
| MinDer Attribute | ||
|---|---|---|
| Klass | Attribute | |
| Typ | Float32 | |
| Flags | ||
| Kropp | RtBody | |
Minsta tillåtna värde vid operatörsändring av DerTim .
| MaxDer Attribute | ||
|---|---|---|
| Klass | Attribute | |
| Typ | Float32 | |
| Flags | ||
| Kropp | RtBody | |
Största tillåtna värde vid operatörsändring av DerTim .
| MinDGain Attribute | ||
|---|---|---|
| Klass | Attribute | |
| Typ | Float32 | |
| Flags | ||
| Kropp | RtBody | |
The minimum and maximum allowed value of DerGain at changes made by an operator.
| MaxDGain Attribute | ||
|---|---|---|
| Klass | Attribute | |
| Typ | Float32 | |
| Flags | ||
| Kropp | RtBody | |
| MinBias Attribute | ||
|---|---|---|
| Klass | Attribute | |
| Typ | Float32 | |
| Flags | ||
| Kropp | RtBody | |
Minsta tillåtna värde vid operatörsändring av Gain .
| MaxBias Attribute | ||
|---|---|---|
| Klass | Attribute | |
| Typ | Float32 | |
| Flags | ||
| Kropp | RtBody | |
Största tillåtna värde vid operatörsändring av Gain .
| MinBGain Attribute | ||
|---|---|---|
| Klass | Attribute | |
| Typ | Float32 | |
| Flags | ||
| Kropp | RtBody | |
Minsta tillåtna värde vid operatörsändring av BiasGain .
| MaxBGain Attribute | ||
|---|---|---|
| Klass | Attribute | |
| Typ | Float32 | |
| Flags | ||
| Kropp | RtBody | |
Största tillåtna värde vid operatörsändring av BiasGain .
| ModeObjDid Attribute | ||
|---|---|---|
| Klass | Attribute | |
| Typ | AttrRef | |
| Flags | ||
| Kropp | RtBody | |
Anger fullständigt namn på det med Pid-objektet associerade Mode-objektet. Attributet gör det möjligt att via knapp i Pid-objektets objektbild starta objektbilden för det associerade Mode-objektet.
| FiltDer Attribute | ||
|---|---|---|
| Klass | Attribute | |
| Typ | Float32 | |
| Flags | ReduTransfer|State|Noedit | |
| Kropp | RtBody | |
Filtrerad derivata sparas till nästa exekevering.
| PDManOffset Attribute | ||
|---|---|---|
| Klass | Attribute | |
| Typ | Float32 | |
| Flags | ReduTransfer|State|Noedit | |
| Kropp | RtBody | |
Offset for P / PD-Controller after switching from manual to auto mode.
| OutWindup Attribute | ||
|---|---|---|
| Klass | Attribute | |
| Typ | Float64 | |
| Flags | ReduTransfer|State|Noedit | |
| Kropp | RtBody | |
Output that is limited with MinWindup and MaxWindup
| AbsOut Attribute | ||
|---|---|---|
| Klass | Attribute | |
| Typ | Float64 | |
| Flags | ReduTransfer|State|Noedit | |
| Kropp | RtBody | |
The absolute part of the output. (contrary to OutWindup)
| PlcConnect Attribute | ||
|---|---|---|
| Klass | Attribute | |
| Typ | AttrRef | |
| Flags | ||
| Kropp | RtBody | |
Referens som visar vilket funktionsobjekt objektet har blivit knuten (connected) till.